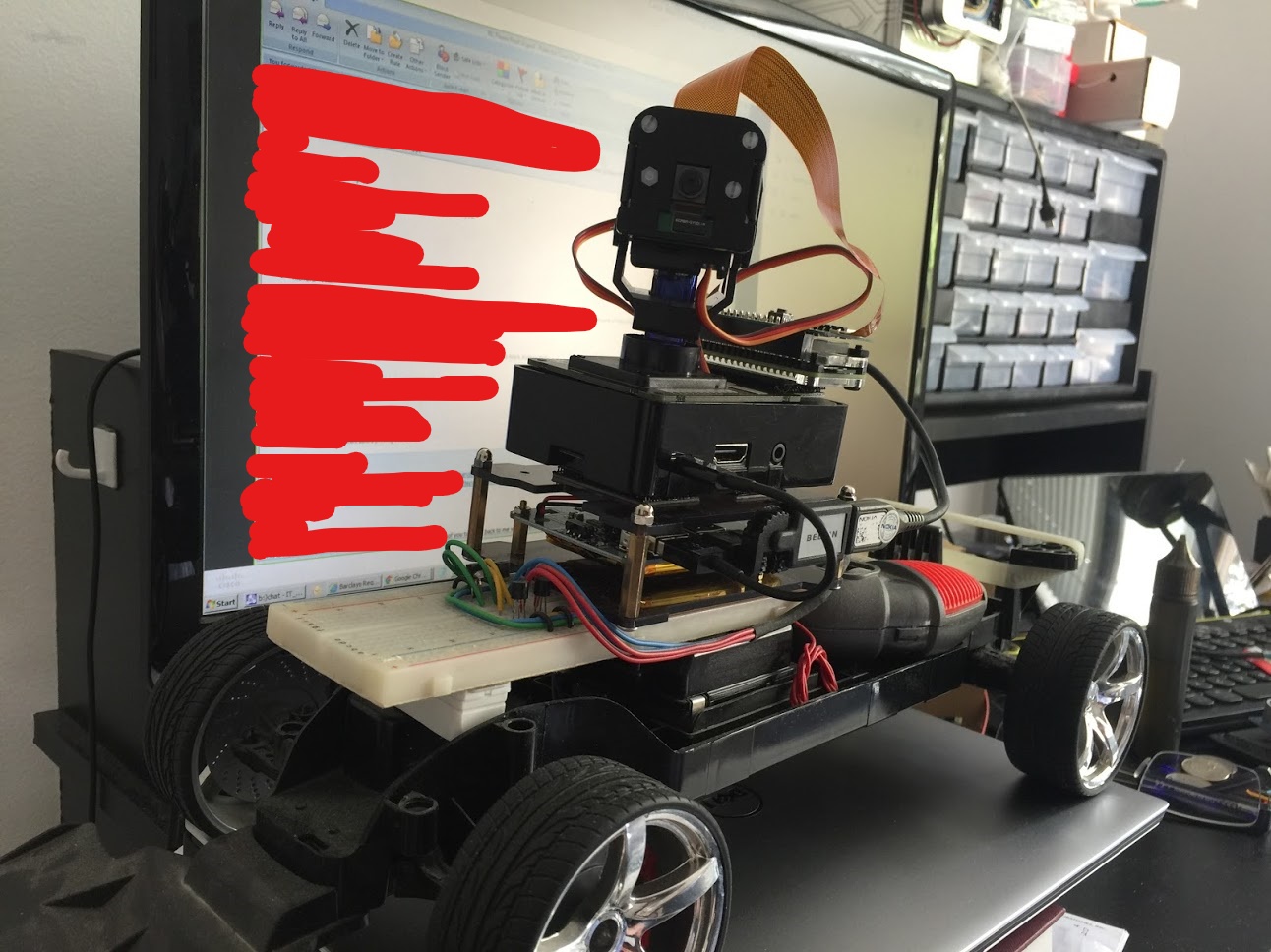
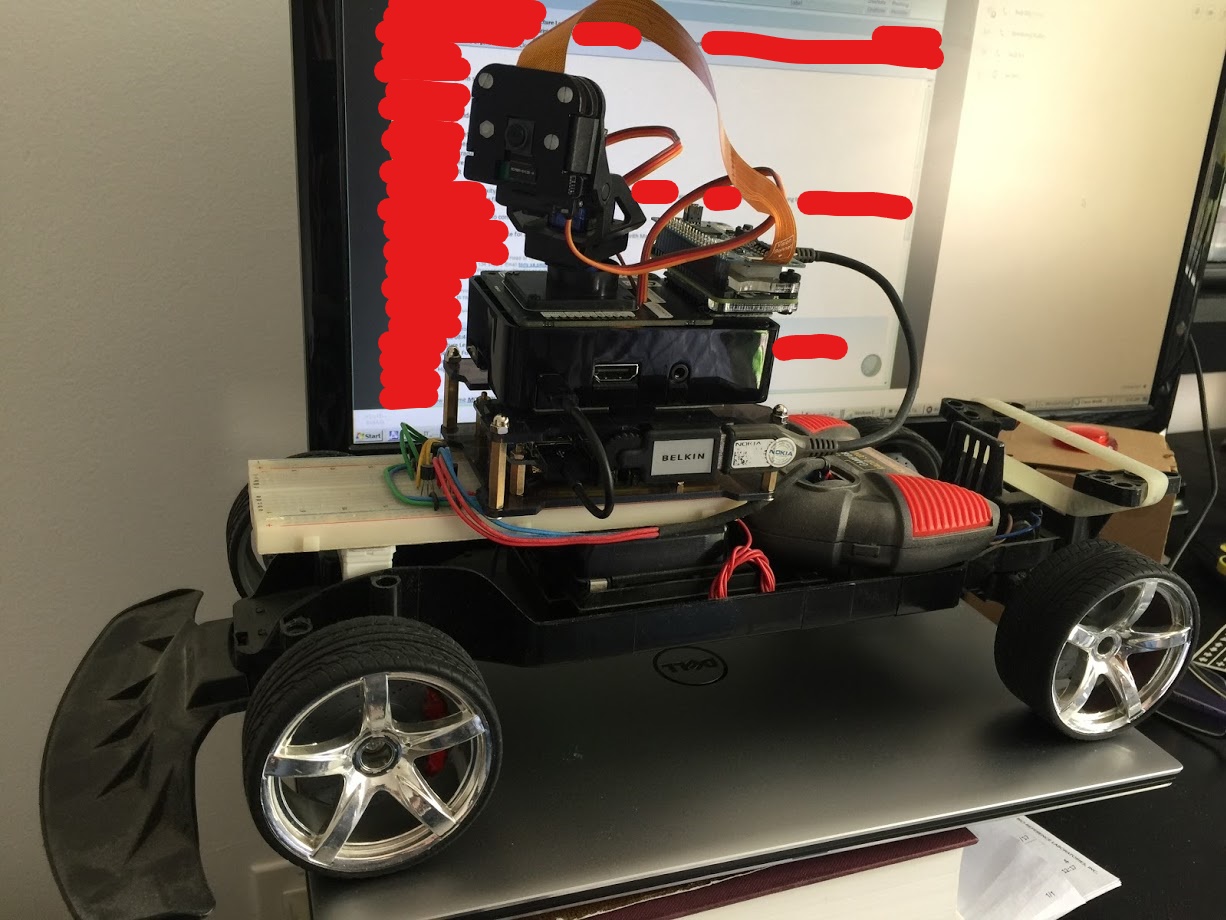
I dusted off my original Pi Racer project that was at one point in time a Particle Photon Racer. Now I plan to turn it into a dual Raspberry Pi setup with a movidius myriad 2 VPU and a camera mounted on a pimoroni pan-tilt hat. I am running Google AIY’s vision ML on one of the pis while the other one is responsible for moving the pan-tilt motor and the driving. The plan would be to have the vision ML detect obstacles as it tries to find a specific object in the room. It would talk to the other pi responsible for the driving using pubnub. If all this works out I would need to start planning the weapons system. As with all dystopian sci-fi movies, the morality module can wait.



- Comment
- Reblog
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
